「複合フライトプランがいい!」
前回に引き続き、「dronelink」について書いていく。「litchi」はそこそこ安定しているが、細かい部分に少し不満を感じる点があり、そんな中この「dronelink」が気になったという話である。
早速、使用していく訳であるが、その前にひとつ注意点。「litchi」はPC上でもスマホアプリ上でもフライトプランの作成が可能だが、「dronelink」ではPC上でしかフライトプランが作成できない。スマホアプリはあくまでもフライトのための操作及び確認ツールでしかない。なので、空いた時間にちょこちょこっとという感じにはなれないと思う。じっくり腰を据えてプラン作成する人向けかもしれない。
スマホアプリはこんな感じ(ドローンとリンクしていないので地図上に飛行ルートが表示されているだけ)
「dronelink」のサイトにログインしたら、表示されるマップに離陸地点を登録し、プランを作成していく。ウェイポイントプランを作成したことがあるなら、すぐに慣れると思う。ただ、日本語に対応していないので、英語が苦手な人はそこが一番苦労するかも。まあ、とにかく色々やってみて覚えるしかない。下のウェイポイントプランは「litchi」で作成したものを「dronelink」にエクスポートしたもの。慣れないうちはこの方法もありかも。

litchiのフライトプランがあれば、エクスポートできる

(doronelinkでのウェイポイントフライトプラン)

(litchiでのウェイポイントフライトプラン)
ウェイポイントごとのコマンドを多少手直ししたが、飛行ルートに関しては完ぺきにエクスポートできている。
さらに、「dronelink」の良いところは、作成したプランをPC上でシミュレートできる点だ。Googleマップを利用したバーチャルフライトで飛行ルートを都度確認することができる。また、飛行速度や高度などの情報が時系列でグラフ化されているので、簡易的ではあるが、自分の立てたプランに決定的なミスがないかどうかが確認できる。これはものすごく便利だ。
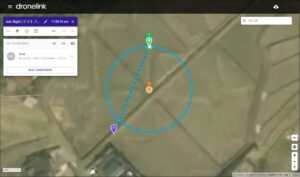
(Orbitの飛行プランを作成しているところ)

バーチャルフライトで飛行ルートを都度確認することができる。画面右上の部分。これは便利!
上のOrbitフライトプランで実際にフライトしてみた。litchiのOrbitフライトプランのものと比べてみてほしい。
まずは、「dronelink」でのOrbit
そして、「litchi」でのOrbit。高度以外飛行条件は同じだ。
この後、何回か実際にフライトさせてみたが、「litchi」と比べても遜色ないことが分かった。
次に、「dlonelink」の最大の特徴のひとつ。複合のフライトプランについて実際に検証してみた。ウェイポイントプランの途中にオービットが入るという複合フライトプランを作成し、実際にフライトさせてみた。バッテリーがもつかどうか一抹の不安があったが、何とか帰還することができた。常用にはまだまだ色々なプランでやってみる必要があるが、今のところ問題はない。ただ、送信機の各ボタンが全く使えないし、コマンド割り当てのメニューすらない気がする。プラン実行途中のRTHや一時停止はできるのか。そういった検証も必要だろう。しかし、ウェイポイントプランをいくつか連結することもできるし、オービットの連結も可能。自由度は高い。これからのバージョンアップで解決されることに期待する。